Control System – Routh Hurwitz Stability Criterion
We already learned about the characteristic equation of any CLTF (closed-loop transfer function) in my earlier post. Now let us see how to determine stability from the characteristic equation of a system(using Routh Hurwitz stability criterion.)
1.Hurwitz stability Criterion:
The characteristic equation of an nth order system is given by:

For stability of the system , it is necessary for us to find necessary and sufficient that the ‘n’ sub-determinants of the Hurwitz determinant ( ) formed using the coefficients
) formed using the coefficients  in any given characteristic equation be positive. The Hurwitz determinant can be formed as shown:
in any given characteristic equation be positive. The Hurwitz determinant can be formed as shown:
H = 
 =
= 
 ,
, 

A system is stable if  are all positive.
are all positive.
So before we see ‘Routh Stability Criterion’, we must look into some of the disadvantages of the ‘Hurwitz Criterion’:
- As the order of the system increases , it becomes difficult to solve individual determinants.
- How many roots lie on the RHP (Right hand plane) is not known.
- Difficult to predict marginal stability of the system.
2.Routh Stability Criterion
The Routh criterion is based on ordering the coefficients of the characteristic equation in the form of an array called the ‘Routh array’ .
From this technique, we can simply say the number of closed-loop system poles present in the LHP, RHP and those lies on jω axis. So with ‘Routh array’ we can find the number of poles in each section(but can’t comment about their positions). Like in Hurwitz criterion, we have to deal with the characteristic equation,
So,
Then the Routh array can be given by(Routh array which consists of only coefficients, will start from the second column onwards in the below representation)
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
|
|
 |
 |
 |
 |
|
|
 |
 |
 |
 |
|
|
 |
 |
|
|||
|
|
|
|||
 |
|
|
From the above array, we can clearly observe that the very first row will simply comprise of all the even terms of the given characteristic equation. If we arrange them serially i.e. from the first (even term) term to the last (even term). The first row of the array can be then written as: a0 ,a2 ,a4 a6…………
Also , the next line (i.e second row) will further comprises of all the odd terms of the given characteristic equation. Now again after arranging them from first (odd term) term to the last (odd term). The second row is then represented as : a1 ,a3 ,a5 ,a7………..
Now , some terms are not present in the characteristic equation, so let’s define those terms first:
 ,
,  ,
,  ,
,
The same technique is used for the next row i.e row using previous two rows i.e and row using the 2nd and 3rd , the 4th row coefficients are obtained.
 ,
, 
We can clearly observe that each column will reduce by one as we move down the array.This method will be continued till the row is obtained.
We should now define the Routh stability criterion as below:
For a system to be stable , it is necessary and sufficient that there present no sign variations (changes in the first column of Routh array.If this condition not met, the system is unstable and the number of sign variations in the very first column corresponds to the no: of the roots of the characteristic equation (closed loop poles) in the RHP.
In a nutshell:
- A system is stable if there exit sign variations (changes) in the first column of Routh array .
- The number of sign changes equals the number of closed-loop poles lying in RHP.
Now we shall look into one simple example to prove the above two points:
In this , we need to check whether the given system is stable or unstable.
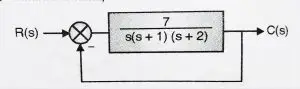
Solution: we know the characteristic equation is given by the formula
1 + G(s)H(s) = 0 ,
Hence, 1 +  = 0 ,
= 0 ,  + 3
+ 3 + 2s + 7 = 0 ,
+ 2s + 7 = 0 ,
Comparing this with standard equation i.e
here, = 1, = 3 , = 2 , = 7 ,
We now construct Routh array,
|
1 | 2 | 0 |
|
3 | 7 | 0 |
 |
-1/3 | 0 | |
|
7 |
We have used the same formula that we listed earlier.
Now let’s do the complete analysis of the stability condition of the system. We can observe that the first column of the Routh array, there are two sign changes ( from +3 to -1/3 and from -1/3 to +7 ).
Hence the given system is unstable with two of the three closed-loop poles lying on the RHP. Also, we can not get the position of the two of the three closed-loop poles lying on the RHP, and only know that there are 2 of them lying on RHP.
Routh criterion special cases :
Special case 1:
There are cases when the first element of a row of the Routh array is zero and rest of the row is non zero. Let us consider an example
Here again we need to determine the stability of system with characteristic equation
 + 3
+ 3 + 2 + 7 + 3s + 5 = 0
+ 2 + 7 + 3s + 5 = 0
Here = 1, = 1 , = 2 , = 2 , = 3 , = 5
|
1 | 2 | 3 |
|
1 | 2 | 5 |
|
0 | -2 | 0 |
|
∞ |
We can see from above that we get infinity at . Thus we need to tackle this problem by one of the two methods discusses below:
Method 1:
We replace ‘0’ by a very small positive number ‘ ‘ and then we complete Routh array by taking
‘ and then we complete Routh array by taking  .
.
|
1 | 2 | 3 |
|
1 | 2 | 5 |
|
0() |
-2 | 0 |
|
 |
5 | |
|
 |
0 | |
|
5 |
We now check whether each of the element in the first column is positive. We know is a small positive number,
 = + ∞ , and
= + ∞ , and  = – 2
= – 2
So there is sign change in row. Also there are two sign changes so 2 poles present in RHP and given system is unstable.
Method 2:
In this method we replace s by ‘ 1/z ‘ and complete the Routh’s array.So again let us consider same system we took previously,
+ 3 + 2 + 7 + 3s + 5 = 0 ,
After replacing s by ‘1/z’ ,
 ,
,
On solving, 5 + 3
+ 3 + 2
+ 2 + 2
+ 2 + z + 1 = 0 ,
+ z + 1 = 0 ,
The Routh’s array will be given by:
|
5 | 2 | 1 |
|
3 | 2 | 1 |
|
 |
-2/3 |
|
|
 |
1 | |
 |
2 |
|
|
 |
1 |
We can again observe that two sign changes are present above and hence the system is unstable.
Special case 2:
Auxiliary equation method
There are cases when all the elements of a row in the Routh array are zero.In this case we should use the ‘Auxiliary equation method’ . Let us see what it is:
In this method,
We will work with the preceding row (i.e row preceding to row containing only ‘0’) , this row is called the Auxiliary Equation A(s) .We differentiate A(s) with respect to s and replace the row of zeros with this result.(this will be clear after solving below example)
We need to determine the stability of  + 5
+ 5 + 2 + 3 + 1 = 0 ,
+ 2 + 3 + 1 = 0 ,
Here = 1, = 5 , = 2 , = 3 ,  = 1 ,
= 1 ,
|
1 | 5 | 2 | 3 | 1 |
 |
0 | 0 | 0 | 0 | 0 |
The Auxiliary equation is
A(s) = + 5 + 2 + 3 + 1 = 0 ,  = 8 + 30 + 8 + 6s ,
= 8 + 30 + 8 + 6s ,
Now putting these values in the row ,
|
1 | 5 | 2 | 3 | 1 |
|
8 | 30 | 8 | 6 | 0 |
|
1.25 | 1 | 2.25 | 1 | 0 |
|
23.6 | -6.4 | -0.4 | 0 | 0 |
|
1.33 | 2.271 | 1 | 0 | 0 |
|
-46.6 | -18.14 | 0 | 0 | |
|
1.75 | 1 | 0 | ||
|
8.48 | 0 | |||
|
1 |
We can see that there are two sign changes, so two poles lie on RHP. Hence the system is unstable.
Relative Stability:
Knowing whether the system is stable or not is not sufficient. Thus relative stability is the measure of how fast the transient dies out in the system. Relative stability is related to settling time . Also from derivations, we already know the settling time is inversely proportional to the real negative part of the roots. So we can directly say that :
“ A system having poles far away from the jω – axis ,is more stable than a system having poles close to the jω – axis. “
Finally, we reach the end of this post. Later I will attach one pdf doc with this post for your practice. Please do solve the numerical without checking out the answers first. I hope you really enjoyed this post, meet you soon in my next post with more interesting stuff.

Aric is a tech enthusiast , who love to write about the tech related products and ‘How To’ blogs . IT Engineer by profession , right now working in the Automation field in a Software product company . The other hobbies includes singing , trekking and writing blogs .